






1、探测时,先调整到所需要的探测方式,然后将频率调整到当时地理环境所反映出的最小频率值进行探测;
打开扫描仪之前,把发she器放在地面上,把传感器天线连接到发she器的对应的插孔内。在发she器打开的时候。绝对不要插拔传感器,如果那样做的话,将会对机器造成损坏。使用EPX10000扫描以前,首先做好仪器的所有必要连接。








接收器——接收器在面板的上面是旋钮开关,它们分别是耳机和天线棒插孔。不使用时,将天线棒从接收器上拔掉!若天线棒插在接收器里保存,则将导致电池漏电。


分子频率探测器的关键点在于握住接收杆的方法,以及身体的位置和走法。
使用者必须以放松姿势站立,两脚稍微分开,双臂紧贴身体但不要太紧。握住接收杆时,手掌和手腕不宜太用力,使其在手中自动达到平衡状态,并始终相互平行。手握杆时,使其与地面平行,以增加其敏感性,或稍微向下倾斜5-8°,达到更好的平衡状态(若你是的分子频率探测的新手)。最重要的一点是练习持杆的方法,直到两杆不再相互“移开”。
接收杆的平衡完成后,操作人员应学会走路的方法,一步一步,同时保持两杆平衡。这是另一种试错法:步伐必须保持正常速度,坚定而均匀。每一步跨过同样的距离,否则两杆将失去平衡。耸肩时会导致两杆失去平衡。应保持两肩在同一高度。尝试练习,并注意保持这些条件。

接收杆的握法、体位和行走练习应遵循测试目标试验的要求,操作者应将测试目标物体放在地面上,观察接收杆的反应。
一旦“开始扫描” 消息出现在屏幕上,开始在距离EPX10000探测器3米处循环走动,保持接收杆处于平衡状态并插入电源模块中。
若存在目标物体,当我们走在目标物体和EPX10000地面探测器之间的传输线上时,两杆就会完全交叉。此传输线对于单个目标物来说通常是15厘米宽。我们可以通过仔细检查判断其是否为稳定信号。这样操作者需要返回、放松、再次移动到传输线上。若接收杆每次都会交叉,然后我们可以按照例2中的信号追踪图追踪目标信号。当操作员穿过埋藏的物体后,将无任何显示。目标物就位于最后一次杆交叉位置和无交叉显示的位置之间。金属探测仪可用于对目标物体进行精确定位。参照我们的示例,继续练习以取得更好的效果。

六、三角形法则定位
该扫描仪发射的信号通过功率传感器进入地下。如果所找的目标在量程范围之内,则信号被目标吸收。指示棒插入功率放大器,使接收器电路变得完整。该电路是通过操作人员的人体电容和功率模块的电感部件形成的。当操作人员行走穿过扫描仪和目标之间的传输线路时,该电路将发挥积极作用。来自传输线路的电感射频能量跟操作人员的电路电感电容交互作用。此时,正常反应是指示棒相互吸引。这实际上是向操作人员传达信息:所找的目标在扫描仪的量程范围之内。
该扫描仪的量程随许多因素变化而变化。首要的最重要的变量是目标大小。其次是土壤情况(存在电解质)和地下时间长短。另一个因素是目标周围土壤的化学变化,该因素可以增强扫描仪的操作性能。对于易于氧化的目标,无论是物体本身还是其容器,都将发出更强信号。由于氧化因素,目标放大扫描仪传输信号的潜力将会更大。
范围内有目标,当你的脚开始跨入能量线,在正常情况下,天线棒将相互吸引。在正常情况下,一个单个目标的能量线宽度为20英寸。
一旦确定能量线,下一步是采用S行测量或者是三角测量法测量目标。
环绕发she器找到信号线,如图通过来回走S型来追踪信号线,当你第一次经过信号线的时候,接收天线应该交叉(标记天线每次交叉的位置),当天线不交叉的时候,你已经偏离了你的目标。当你走过目标物后,指示天线不再交叉。
当一个人想确定位于水体、悬崖等难以接近(例如,湖泊或溪流)的目标位置时,该扫描仪跟目标位于平地上一样好操作。要记住的最重要的问题是,操作人员必须能够进入目标和功率传感器之间,以便天线棒能够指示任何潜在目标。显然,你不能把天线棒拿到水下。最佳的方法是推测情况, 以及从岸上或一只大甲板船上对目标进行三角测量时,应用一些基础几何知识。
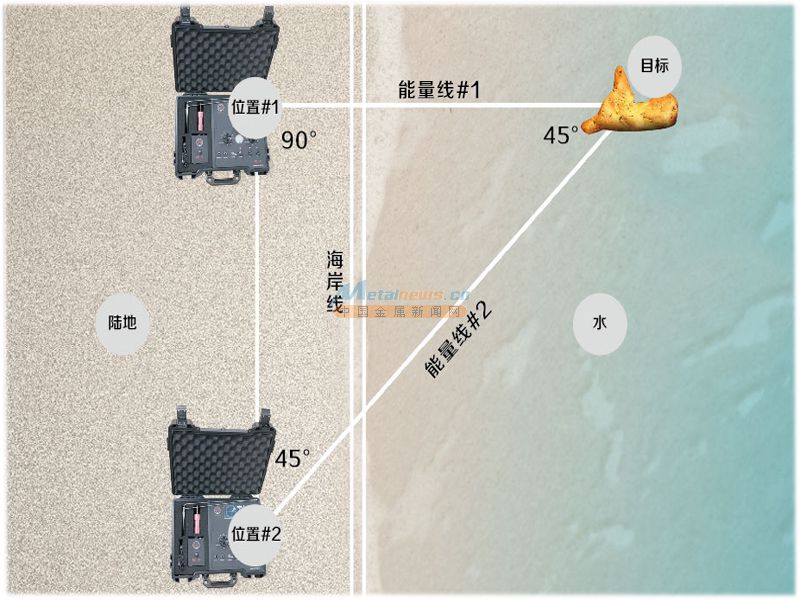
当从岸上操作时,首先看在扫描仪的测量范围内是否有任何目标。如果有的话,第一步是移动扫描仪,这也是最容易的一步,使其在罗盘四个主要方位中的一个方位上操作(北、南、东或西)。第二次读数应该跟第一次读数呈45°角。例如,如果第一次读数位置位于目标的正西方向,第二次读数位置既可以在正西北方向,也可以在正西南方向。参照下图。
从船上操作,对操作人员来说,具有一些有趣的挑战。第一个挑战是甲板大小。操作人员必须能够有以功率传感器为圆心的约5′-10′半径。第二,功率传感器的探头必须与船只的甲板接触。为了解决这个问题,使用湿毛巾缠绕探头,湿毛巾跟甲板接触。射频能量将沿着目标方向和甲板表面。需要使用浮标,以帮助三角测量目标。其余过程跟第一种方法非常相似
请注意,位置#1位于目标的正西方向。位置#2位于正西南。鉴于该情况,我们最后有2个45°角和一个90°角。因此,从位置#1到位置#2的距离等于位置1和目标之间的距离。结果是,你已经采用三角测量法测量了目标,现在知道从位置#1到目标的距离。
